Blog entry by Lisa Skein
By the time you read this we would have passed the halfway mark of JC237! It genuinely feels like time is flying and I can’t believe we only have about two weeks left at sea. Seeing as we’ve come to this stage of the expedition, I thought it would be good to provide a quick recap on what we’ve achieved thus far.
So far, we’ve completed 12 ROV dives, 11 AUV missions, 18 deep water CTD casts, 70 push-cores (taken via ROV), 10 gravity cores, and 4 mega-cores. This is great progress and we have already collected an incredible amount of data that’s teaching us a lot more about the Whittard Canyon system and all of its complexities! As with any fieldwork, we have also been faced with a few obstacles including a couple of very “cloudy” ROV dives, an AUV that got a bit scared when she came too close to the seabed, and a RoCSI eDNA sampler that needed a few small upgrades. I’m happy to report that almost all of these problems have been solved, apart from the bad visibility during a couple of ROV dives that is unfortunately not within our control but in the hands of mother nature!

The most recently completed ROV dive has been particularly exciting for our geologists on board as they were able collect rock samples from the seabed using a rock drill! As we do our best to get the most out of each dive, we also collected biological samples and more visual survey information. Much of this will be used to establish how accurate statistical models have been in predicting where certain habitats and species are likely to be found, and to help improve the accuracy of future predictions these models will make.



Improving deep sea maps
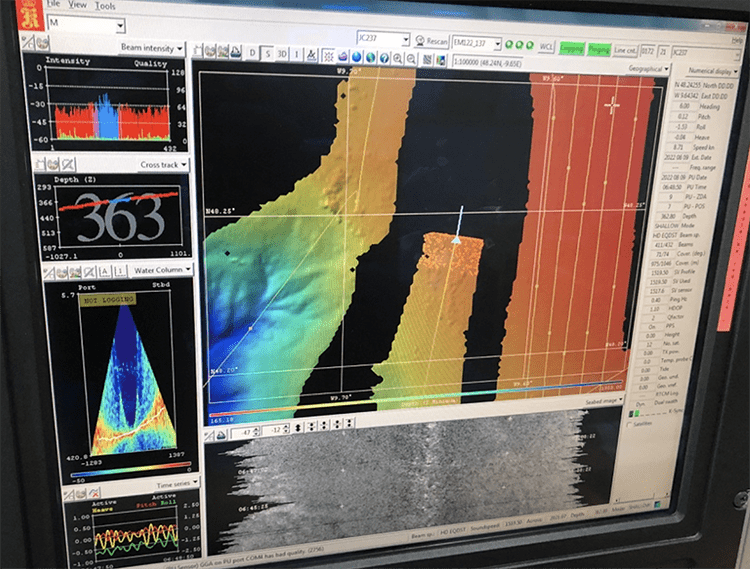
As I’m writing this, the RRS James Cook is stationed above the Eastern Canyon of the Whittard Canyon system and the ROV is performing a multibeam sonar survey of the Acesta wall we’ve written about in an earlier article. Multibeam sonar is an acoustic mapping technique used by ships to perform geological surveys of the seafloor. Usually, multibeam echosounders (the devices used to perform the surveys) are hull-mounted on ships and are therefore downward-looking. This set-up is perfectly fine for constructing seabed maps that reveal the depths at which major geological features are distributed. It cannot, however, provide good resolution of vertical structures such as overhanging cliffs, caves, terraces and gullies (features that are often found in submarine canyons). Indeed, we’ve observed some very dramatic and unexpected geological features during ROV dives on this expedition; features that were not obvious from current bathymetric maps produced by downward-looking sonar.
In addition to the valuable imagery and physical samples we get from deep sea vehicles like ROVs and AUVs, these vehicles also present new opportunities for seabed mapping. To accompany the traditional downward-looking sonar used by ships, scientists have recently started to use these underwater vehicles to perform mapping surveys of vertical features. This is done by modifying the orientation of multibeam echosounders in a sideways-looking direction, as opposed to the traditional downward-looking approach. This technique has been immensely informative in revealing intricate features of marine habitats, especially in submarine canyons.

A very special birthday
In the meantime, I’ve just spent my very first birthday at sea! It’s been truly special and I’ve been spoilt with cake, chocolates and special cruise memorabilia. To end off the day, the ROV team had a last surprise in store for me: potentially the world’s deepest birthday card! (See below). A heartfelt thank you to everyone on JC237 (and especially the night shift team) for making this a birthday I’ll remember forever.

Blog entry by Luis Greiffenhagen
Hello again from Whittard Canyon. We have been out here for a while, and since we just finished our 10th ROV dive in the area, it might be a good occasion to give you an update on what we have seen so far. Besides the incredible habitats full of corals and clams, and spectacular geological features you might ask yourself the question: What swims around in these canyons? There are some wild, weird and wonderful creatures down there! While some are very shy, others are curious and attracted by the lights of our ROV!
On dive 388, just when reaching the bottom (1320m depth), our crew was greeted by a “dumbo octopus” (Grimpotheutis). This incredible species is famous for its cute looks, having fins above its big eyes that look like elephant ears. However, we still know very little about these creatures, which have been observed down to more than 7000m depth (deeper than our ROV can go!).
Look how our lights shine in her big black eyes! It was a truly amazing welcome to the bottom of the canyon.
During the night, when the ship is stationary, tiny fish and squids get attracted by the ship’s lights. This is when we see elegant blue sharks (Prioace glauca) circling the RRS James Cook. Blue sharks are pelagic sharks that occur around the globe and can grow up to more than 3m length. Worldwide shark populations are estimated to have declined by 71% since the 1970s, making it even more special and promising to see these predators beneath our ship. Last week, Nathan from NOC was able to film one of them passing by.
Shark video © Nathan Hubot, NOC
Talking about sharks: during our ROV dive in Explorer Canyon (Canyons MPA) we saw the only known relative of sharks and rays (cartilaginous fish): A chimaera – also referred to as “ghost shark”. Indeed, it looks kind of spooky and rather prehistoric. Fossil findings show that they are one of the most ancient groups of fish alive today, as they have been around for more than 350 million years.

We also had an encounter with a massive black (Norwegian) skate (Dipturus nidarosiensis) at around 700m which was rather distracting, at least for the ray. It graciously cruised around the ROV while we were taking coral samples. Perhaps still reflecting on what it just saw, it then bumped into a nearby rock. We hope he is doing okay. These things happen to everyone.
Last but not least, here is a little collage of other amazing fish we were able to capture in the last 10 dives, put together by Brian Bett (NOC).

Interview with Dr Rob Hall, physical oceanographer at University of East Anglia, UK.
Interview by Luis Greiffenhagen
Ocean health research certainly involves many disciplines – but it is impossible without oceanography. Therefore, our interdisciplinary team is lucky to have Rob (pictured right) on board the JC237 cruise as a physical oceanographer. Through his studies and expertise, we can understand the physical processes that occur within Whittard Canyon and link them to other disciplines. As this is incredibly interesting, we decided to ask him some questions for our iAtlantic blog. Enjoy!

How and why did you become a physical oceanographer?
I was going to study physics at university, but at the last minute changed I my mind and started a general oceanography degree at University of Southampton – I had always been interested in the ocean and marine environment. By my third year I had drifted back towards physics and during my master’s year and PhD at University of Liverpool I focused on physical oceanographic topics.
What makes the Whittard Canyon special from an oceanographer’s perspective?
From a physical oceanographic perspective, Whittard Canyon is unusual and interesting because it is highly dendritic (branching like a tree – see image below). Different physical processes are at play in different branches of the canyon, which we hypothesise impacts the local chemistry and benthic ecosystems.
.

What are you investigating on this cruise / What do you want to find out?
The physical process I am investigating in Whittard canyon is internal tide generation and breaking. These are the subsurface cousins of the surface tides most of us are familiar with and can exist because the interior of the ocean is stratified (the water at the surface is less dense than the water at depth). Internal tides are generated by surface tidal currents flowing over the steep geomorphic features of the canyon and can be up to 200 m high! When these giant waves break in other parts of the canyon, they mix the stratified water and help bring deep nutrients to surface, where they can be used by phytoplankton to bloom.
What equipment do you use to obtain oceanographic data?
The ‘core’ instrument for a physical oceanographer is the CTD rosette. This instrumented metal frame is lowered over the side of the research vessel on a conducting cable and measures the temperature and salinity (salt content) of the ocean beneath. From this we calculate the density of the seawater, which is what drives most deep-ocean currents.
We also use Acoustic Doppler Current Profilers (ADCPs), which send out pulses of high-frequency sound and measure the Doppler shift of sound reflected from particles in the water (such as sediment and phytoplankton). From this we can infer the movement of the seawater. We have ADCPs mounted both on the research vessel’s hull and the CTD rosette.
Finally, we have my favourite tool, an autonomous ocean glider. This glides through the water, driven by a buoyancy engine, and measures the temperature, salinity and oxygen concentration of the ocean as it goes along. Every few hours it surfaces and sends the data it has collected back to shore via satellite and it is emailed to me. This means that I can analyse the data from it in near-real-time.

How do you find life on a research ship?
Collecting new data is always exciting. With the hi-tech tools now available we can perform many analyses while still at sea and adapt the experiment as we go along. You can get fully immersed in the process as you don’t have the distractions of your usual daily life.
—
Thanks so much for the interview, Rob. If you want to know more, please read one of Rob’s previous publications on the physical dynamics and internal waves within the Whittard Canyon.

Blog entry by Lisa Skein & Luis Greiffenhagen
A few days ago, stationed above the “western middle branch” of the Whittard Canyon, the ROV went down once more. This time, the objective was to perform a photogrammetry survey of a very special section of a vertical canyon wall. What makes this particular wall so special is that it’s covered by incredible densities of Acesta excavata, or fire clams as they are commonly referred to.
First discovered in 2012, the “Acesta wall” has been shown to be home to many other deep sea organisms. This is partly because the outer surfaces of the clams’ shells, in addition to all the little crevices between multiple clams, provide additional habitat for other organisms that may not otherwise have been able to live in that particular spot. In addition, because of the clams’ feeding activity, there are more nutrients in the area that can be used by other organisms. These other organisms can, in turn, be eaten by other organisms. What you end up with is an entire ecosystem. For this reason, Acesta clams (up to 15cm in diameter), are referred to as ecosystem engineers. Other well-known species that also have this effect include corals, mangrove trees, mussels, and kelps.
Indeed, during our recent ROV dive in this habitat, we observed many different deep-sea species on and around the wall. This included species like flytrap anemones, cerianthid anemones, deep sea oysters, cold water corals, sea urchins, starfish, crabs, conger eels and probably many more that we haven’t yet spotted from the latest photos and videos. They can all find their ecological niches within this habitat, giving the Acesta wall the function of a marine animal forest.

Why go back to known sites, when so many areas have not been seen before?
When doing deep-sea research, it may be tempting to continuously go to new areas that have never been looked at before. This we do, yes, but it’s also important that we revisit sites like the Acesta wall. Solid scientific research relies quite a lot on repeated observations of whatever it is you’re measuring or trying to figure out. For this reason, the Acesta wall has been revisited a few times since its discovery. This is being done to collect more data on the organisms that live there, to document if and how they change over time, and in trying to understand why they are so abundant in this particular part of the larger Whittard Canyon. To get to grips with all of this, it’s also important to understand how the water moves, what nutrients it carries, how the surrounding areas look, and so on. These are all questions we are trying to answer during this research expedition.
On this particular night, our aim was to perform a photogrammetry survey on a 10 x 100m area of the Acesta wall. Photogrammetry is a technique that can be used to provide a complete panorama of a large area by stitching together multiple images. To do this, the ROV performs several continuous photographic lines over a specific area, making sure that there are overlapping sections across all the lines. These overlapping sections are then used to stitch together the entire picture, giving scientists a pretty good view of the entire wall in this case.
The discovery and further study of habitats like these are important not only because it advances our understanding of deep-sea habitats, but it also helps us and decision-makers to make informed decisions about which areas are important when it comes to conservation planning.


Blog entry by Lisa Skein
The RRS James Cook and her crew operate 24 hours a day. Whether it’s steaming between scientific study sites, deploying instruments, collecting samples, solving technical problems, planning next missions, or making sure the ship runs smoothly, everyone on board does their bit and works HARD. However, everyone needs to eat …
So what does the food aboard a scientific research vessel look like? This is probably one of the most frequently asked questions about life on board and admittedly is something I also wondered about before joining the ship. I think it’s safe to say that we are incredibly spoiled and the food has been nothing short of fantastic!

Breakfast is served from 07:30 and usually consists of classic English breakfast items, a variety of nuts, yoghurt, cereal, fresh fruits, scones, croissants, you name it! We have proper coffee and tea (of course) available around the clock. Lunch can be anything from hearty pies, mac & cheese, baked veggies, and burgers, and is usually from served from 11:30 while we’re at sea.

Dinner is by far my favourite and also when we get really spoiled (I’m talking dessert. every. day). We are yet to have an official vote, but the battle for the first place favourite is currently between fish & chips (Fridays) and curry nights (Saturdays). We also have steak nights, Asian-inspired nights and classic Sunday roast. Dessert can be anything from waffles and ice cream, cheese cake, sticky toffee pudding, black forest cake, or apple crumble. Every meal is also accompanied by a selection of fresh salad ingredients and cooked veggies, so you really don’t have an excuse of not getting your greens in too! Great effort goes into every meal, including special catering for different dietary needs.

Meal planning 101
So how do you keep a crew of 54 fed for five weeks? Meticulous planning. So much so that as soon as we arrive back in Southampton in September, orders are ready to be placed for the next cruise that will take place over Christmas season. A lot of special thought goes into this planning, for example making sure that the crew on board during this time will be able to enjoy foods characteristic of Christmas, making home feel a little less far away.
I’ve been lucky enough to have been given a tour of the food storage facilities by head chef Spike and was blown away by all the effort that goes into planning meals and ordering of ingredients. While in port, ingredients arrive by truck and are carried off into one of four main storage freezers/fridges with different temperatures. One freezer is for meat, another for fish, and then fridges for dairy products, fresh fruit and vegetables. Temperature gages are displayed outside of each freezer and in the ships’ engine room, so in the event of an electrical fault the engineers can act on it before anything goes to waste.

There’s also a massive pantry stocked with a multitude of spices, cereal, pasta, biscuits, tea, coffee, spreads, jams, and sauces. Items with the shortest shelf life are used first: things like bananas, mange tout, and green beans, while potatoes and the like will easily see us through the entire cruise. Chef Spike tells me that the longest that the RRS James Cook can provide catering without re-stocking is about 6 weeks!
Menus for each week are put together in advance to help keep track of what needs to be taken out of the freezer and when. From there it goes to the preparation area in the galley and can be placed in the short-term use fridge if need be. The galley is fitted with all the appliances you can think of. A combination oven that can either steam or dry heat, hot press, a giant mixer, more refrigeration space, two deep fryers, and many more. As I’m getting my tour, the chefs are busy preparing a lamb Rogan Josh sauce and chicken stock for curry night.

Feeding people in locations around the world has been a way of life for both of our chefs. Spike has worked in the catering industry for 40 years, many of which on ships. Before working on ships, chef Coleen spent about 24 years cooking for the British army. Having completed many trips with the army, including tours of Iraq, Afghanistan, Hong Kong, and many other locations, she is very much used to living out of a suitcase and I’m certain she’ll be able to tell you a good story or two. I sure hope I get to hear more of her adventures during this cruise!
I’d like to conclude this article by extending a sincere thank you to our wonderful chefs and the hard work you put in every day. Your warm spirit paired by excellent food is a true highlight of each day for everyone on board. And last but certainly not least, thank you to Denzil, who works around the clock to keep everything in a spotless state (and for explaining some British slang to this South African!).

Blog entry by Luis Greiffenhagen
Hello back from Whittard Canyon! The weather has been great, flat ocean, no clouds and 25°C! Due to the great conditions, we have collected a lot of data. An incredible amount of it comes from our new autonomous underwater vehicle (AUV), the Autosub5, which is a type of robot submarine and the newest, high tech observation vehicle we have on board.
It has been operating every day since we arrived at Whittard Canyon – so here is a short summary about the AUV and what it does.
Autosub5 has only been in the ocean once and is probably one of the best AUVs in the world right now. It has been developed over the last years by the Marine Autonomous and Robotic Systems division (MARS) of NOC. As it is still kind of a prototype, the AUV engineering team onboard is constantly working on improving its performance. Due to their great work, it has already proven to be very reliable on our cruise.


What is the AUV doing?
While the ROV (remotely operated vehicle) is connected to the ship via a huge umbilical /wire and is better suited for taking samples and fine-scale videos, it needs a lot of people working on it when in water. In contrast, our AUV does its job just by itself when on mission. For each dive, the very complex missions are being programmed onto its computers (5 alone for board control), but after that, we just have to drop it into the ocean. It runs a predefined route at a speed of around 2m/s, constantly sensing the environment and reacting to it. Autosub5 already went 100km away from the ship on this cruise and can go down to 6000m depth!

Challenges running an AUV at Whittard Canyon
The biggest challenge for the AUV team here is that we are surveying in an area with boulders and rough terrain, e. g. sudden elevations – but we also want the AUV to be very close to the seabed for our surveys. To avoid a crash, all missions require very detailed planning of the route.
How do you know where the AUV is?
While underwater, the team can only communicate with the AUV when it is close to the ship via telemetry. On the surface, they can control the AUV through satellite and through AUV wi-fi up to a distance of 1km. Once the AUV surfaces after a dive, we usually go on the bridge and try to spot it. After we found it, the captain steams there for its recovery.

Mapping the Ocean
While previously the duration of one AUV mission was quite limited, the new Autosub5 is super efficient and has a range of 24 hours and is perfect for high-resolution ocean floor mapping of large areas.
Mapping the seafloor is very exciting. While mapping new terrain on land has been the challenge of cartographers hundreds of years ago and has been perfected by satellite images in the last decades – the ocean is a completely different story. Now we can actually say that we know more about the surface of the mars (!) than of the ocean floor.
Underwater, we rely on acoustics to understand what the seafloor looks like. Therefore, different frequencies of sound are pinged from Sonar equipment in the AUV. Depending on how much time it takes for the echo to come back, and on how strong that echo is, we understand the heterogeneity of the seafloor.
Onboard the Autosub5 is, amongst many other devices, a multibeam echosounder (MBES) that produces a topographic (3D) bathymetry map, e. g. of the terrain and depth. With a resolution of up to 0.5×0.5m (per pixel), the smallest changes in seabed topography can be mapped. Check out this video if you want to know more about how it works.
At the same time, we also have a Sidescan Sonar that gives us an image of what the composition of the ocean floor looks like (rocks, sediments, boulders, or even wrecks). It currently has an incredibly high resolution of around 15cm. Here is an example of an area that was mapped during an AUV survey from NOC and you can clearly see how different they look.

Mapping the deep Atlantic Ocean is crucial to understanding all geological, biological and oceanographic processes and how they interfere. Further, it is key to predict the distribution of important ecosystems.
So: Off to the next mission!
Many thanks to the AUV team and see you soon!!
Blog entry by Lisa Skein
Greetings to all our blog readers! We are writing to you from a deceptively calm-looking North East Atlantic. We’ve been very lucky with a few days of great weather and have been hard at work trying to utilise these days (and nights!) as best we can.
While things on the surface may appear calm, down below it has been quite the opposite with the ROV battling against strong currents and internal tides in the canyon. As the ROV pilots are plunging through the darkness, I’ve taken some time to sit down with Esther Sumner, our on-board sedimentologist, to learn a bit more about the importance of understanding the dynamics of deep sea sediments.
It’s only relatively recently that scientists have come to discover that the Whittard Canyon is not as inactive as once thought. Submarine canyons so far offshore are generally assumed to be fairly quiet, but this is not the case here. There are avalanches, with similar dynamics to those on snowy mountains, that carry vast amounts of sediment from shallower areas, through the canyon, and into the deep sea. Unpacking aspects of sediment avalanches (turbidity currents in scientific terms), such as how often they happen, how big they are and how far they go, are all factors that play an important role not only for the animals of the deep but also, in fact, for humans.
On the biological front, the movement of sediments also mean the movement of the things they carry. This can include things like valuable nutrients, but also unfortunately things like microplastics and pollutants that have gathered in and on sediments over time. To investigate how nutrients and pollutants are being spread through the Whittard Canyon by these avalanches, we are collecting core samples in different areas where we expect sediment to travel through.


Large avalanches can also be quite destructive to infrastructure installed on the seabed, such as fibre-optic cables and scientific moorings. The majority of global data transfer happens through fibre-optic cables on the seafloor. In 2020, a massive sediment avalanche in the Congo Canyon resulted in substantial damage to seafloor cables that severely affected internet speeds across large parts of central, south and west Africa. It also broke scientific sensor moorings that were collecting valuable data on submarine canyon processes (see here for more). It has since been revealed that changes in weather patterns owing to climate change can be a substantial contributing factor of events like these. As the majority of global data transfer takes place through seafloor cables, such events can have major economic impacts.
In addition to avalanches, we are also zooming in on canyon sediments to examine the impacts of heavy fishing pressure, but more on this later…
On a closing note: our ship pigeon has since received the not-so-exciting name of Michael. He’s currently living his best life on the ship and has claimed an official spot on the aft deck.

…deep ROV dives, coral chalêts, sharks and strange visitors
Blog entry by Luis Greiffenhagen, NOC


It has been very busy on the RRS James Cook since we arrived at Whittard Canyon. Our shifts have started, we all got used to our routine and responsibilities. Especially in the first days, there are always a few technical issues and plans change very quickly. But most importantly, we already had some successful missions and collected lots of data – here is an update on what happened so far since Monday:
After we took our first deep CTD (conductivity, temperature, depth) sample (4007m), in the morning hours of Monday we reached the easternmost part of Whittard Canyon, which is still in British waters, e. g. The Canyons Marine Protected Area (MPA). This area includes two stunning canyons, the Dangeard Canyon and Explorer Canyon (>1000m depth), separated by two large interfluves (300-400m depth).
On one of these interfluves, small, extinct coral mounds (click here if you want to know more about mounds) and trawl marks from fisheries were previously found. In order to further explore this area, the brand new AUV Autosub 5 and our ROV Isis were sent on their first missions. Through re-mapping the area at high resolution, taking photo-/video transects, sediment cores, water samples and sub-bottom profiles we want to see how the area changes over time.
Excitement levels were super high when our ROV Isis went into the water for the first time. Due to the pandemic, it has been more than three years since Isis did her last dive. Therefore, we all took some time to get used to the procedures in the ROV container again, which is full of screens, displays and controllers. While the pilots sit in front, there are two or three scientists sitting at the back, directing the different operations, the science camera and logging observations. Once we arrived at the bottom – which every time feels a bit like landing on the moon – there were huge schools of Boarfish (Capros aper).


As part of the ROV Dive, we deployed very exiting experiments by James Strong (NOC) and Louise Allcock (National University of Ireland, Galway) on the ocean floor. “ARMS” (Autonomous Reef Monitoring Structures) is a structure that provides surface for coral (and other invertebrate) larvae to settle. Due to coral reef degradation worldwide, these structures have been widely and successfully used in tropical coral reefs for coral restoration. Deep-sea coral reef restoration is just in its infancy, and in order to find out which substrate is best for larvae settlement, James additionally mounted roof tiles, partly covered in lime on top of a square framework. The plan is to come back in a few years to that location and see if it has been colonised by cold-water coral species. Due to its familiar looks, the structure has earned a few nicknames on the ship, such as “coral chalêt”, or, less glamorous, “settlement shed”…

The second ROV dive followed after a short transit to Explorer Canyon, where we went back to look at a massive wall. After a few hours we crossed the canyon, went through the thalweg at around 950 meters depth to then re-visit the known cold-water coral reef of the Explorer canyon. It was incredible to see such a biodiverse, colourful animal garden created by the habitat-forming species Desmophyllum pertusum (former Lophelia), Madrepora oculata, but also lots of crabs, anemones, the endangered fish orange roughy (which can live over 200 years) and other rather weird creatures. We repeated a high-resolution 3D model of the reef in order to see how the reef changed in comparison to the last cruise. It looked healthy, however, we saw quite a lot of litter, which can be worrying considering that we are hundreds of miles offshore. Further, we took some biological and geological samples in the area to better understand seabed processes, organic carbon and microplastic contents (more on that soon!).
Last but not least, we mapped the last blank spot on the map of our British conservation zone (MPA) with our shipboard multibeam echo-sounder.

In our breaks, we were able to see some amazing marine life from the deck: Lots of dolphins accompanied us on the way to Whittard Canyon, and there have been sightings of some whales in the distance. While we could not capture those on photo, we had an epic encounter of our ROV with a Porbeagle Shark (Lamna nasus) at around 70 meters depth (see video clip below – © ROV Scorpio Camera, NOC). The very fast and agile species is from the same order of sharks as the famous great white and came to say hi to us.
Besides that, we realised that we have some unusual passengers: There is a non-flying pigeon onboard – It must have boarded the RRS James Cook (without security check!) just before leaving Southampton and has ever since been observing our on-deck operations with curiosity. We are currently in the process of finding a good name, so do not hesitate to contact us about this.
We will update you soon on our next missions!

Blog entry by Lisa Skein
Excitement levels were high on board the RRS James Cook as we finally set sail for the Whittard Canyon at 11:00 on Saturday morning. Earlier the morning, the science crew received an introduction to the ROV Isis. In the coming days this ROV, rated to go to depths up to 6500 m, will be fitted with a range of tools to collect valuable biological, geological and chemical samples from Whittard Canyon and the Porcupine Abyssal Plain. In addition, the visual footage from Isis will be livestreamed in the main lab so that everyone will be able to see what Isis is seeing! We cannot wait to share images from the first ROV dive that will take place in a couple of days once we’ve reached our first site in Whittard Canyon.

Within a few hours of setting sail, the Continuous Plankton Recorder (CPR) was deployed behind the ship and will be brought back on board in about two days’ time when we reach Whittard Canyon. The CPR was designed in 1931 and the particular device used in JC237 is a strong contender for being one of the oldest devices currently being used on board. With a clever mechanical design, the CPR is, as per its name, continuously collecting planktonic species as we sail from Southampton to Whittard Canyon. As water moves through the CPR, plankton specimens are deposited onto a layer of silk that slowly unrolls from its coil inside the device whereafter it gets preserved until later analyses which will be performed by the Marine Biological Association. This will give researchers an idea of plankton communities and how they may change as one moves from the coast, over the continental shelf and across the Whittard Canyon.

At the same time, the ship’s underway system is supplying surface water to the eDNA laboratory. From this surface water, the Robotic Cartridge Sampling Instrument (RoCSI) is autonomously collecting genetic samples, one sample each hour. These samples will be preserved until the end of the cruise whereafter molecular analysis will tell us which plankton species have left traces of their DNA in the surface water. As the samples collected by the CPR and RoCSI are essentially covering the same area during the same time, it will be very interesting to compare the results yielded by these two sampling techniques. Samples collected via RoCSI may reveal species not detected by the CPR, and vice versa. A combination of these techniques can therefore give us a pretty good idea of the plankton communities we passed during our transit from Southampton to Whittard Canyon. This work forms part of the AtlantECO & CLASS programmes.

Back to the main lab, where our first night shift team is busy settling into their new routine. We are lucky to have a great weather forecast for the coming days and at the moment everything is smooth sailing! Watch this space for more updates from JC237.
Blog entry by Luis Greiffenhagen and Lisa Skein
JC237 is leaving the dock and is off to Whittard Canyon!
After four days of quarantine and mobilisation, everyone is onboard, all our equipment arrived and we are ready to go! The next four weeks are fully packed with interdisciplinary research missions.




Although everyone was really busy getting all the equipment ready, we still had time for some interesting talks – Josh Tate from JNCC gave us an introduction to the Canyons MPA (Marine Protected Area), which is England’s only MPA that contains cold-water coral reefs. Since June 2022 it is protected from fishing activities, so this is a great opportunity to collect some data for point 0.
Also, he developed a very helpful species guide for the area that will be very helpful once we get the ROV running and will sight our first live footage.

Luis Greiffenhagen gave a presentation of his research on coral walls with the University of Edinburgh. While he focused on Norwegian fjords, we have similar species and seabed morphology in Whittard Canyon, and we talked about how vertical coral reefs are still often underrepresented in deep sea coral research.
Also, we heard about the research on marine canyons in South Africa from Lisa Skein, SANBI (South African National Biodiversity Institute). Alongside with very interesting facts about the prehistoric coelacanth that was re-discovered in this area, we learnt about the diversity and conservation of marine canyons across the four (!) marine ecoregions off the vast coast of South Africa.
Finally, Esther Sumner (University of Southampton) introduced us to her research on dynamics of seafloor sediment avalanches. She showed us how we will use cores and sediment traps from mooring buoys on our cruise to better understand these processes, which can impact human infrastructure. She made an amazing illustration of it (see below).

Besides that, we could still exercise on the quayside, get to know each other (still with masks on though) and our PI, Veerle Huvenne, was able to give us introductions on how the next four weeks will look like. We already divided the science team into two groups that will each work for 12 hour shifts: 4am to 4pm and 4pm to 4am. In this way, everybody has some part of the night to rest and the operations call still run 24hrs per day.
The ship is leaving around 11am on Saturday and we expect a 40-42 hours transit to Whittard Canyon. Once the ship is on its way, Susan Evans (NOC) will already deploy the Continuous Plankton Recorder from the MBA CPR Survey and the shipboard multibeam echosounder will be switched on. We will also get an introduction to the ROV and run a safety drill on the way out.
You will hear from us once we reached our famous study site!
© 2024 iAtlantic. All rights reserved.

This project received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 818123 (iAtlantic). This output reflects only the author’s view and the European Union cannot be held responsible for any use that may be made of the information contained therein.